Introduction to Rotation Matrix And Reference Frames Numerical Methods With Python 4 Pfs2Yi1oLsI
Looking for Rotation Matrix And Reference Frames Numerical Methods With Python 4 Pfs2Yi1oLsI details? We've gathered comprehensive information, latest updates, and exclusive insights for Rotation Matrix And Reference Frames Numerical Methods With Python 4 Pfs2Yi1oLsI. Explore the complete Details breakdown, history, and detailed profile.
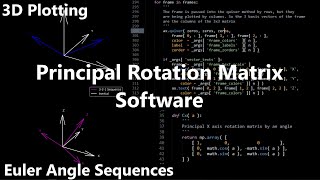
This video provides an intuitive understanding of what This video provides an intuitive understanding of the This video covers how to use SPICE's euler angles to direction cosine This is a video supplement to the book "Modern Robotics: Mechanics, Planning, and Control," by Kevin Lynch and Frank Park, ... This video covers the principal rotations (x, y and z axes) and their This video covers how to intuitively understand eulers angles, and how they are useful
This video introduces the concept of position vectors and orientation/
Key Details
Explore the primary sources for Rotation Matrix And Reference Frames Numerical Methods With Python 4 Pfs2Yi1oLsI.
Developments
Stay updated on Rotation Matrix And Reference Frames Numerical Methods With Python 4 Pfs2Yi1oLsI's newest achievements.
Euler Angles Explained | Numerical Methods with Python 7
Spatial Descriptions and Transformation Matrices for Robotic Manipulators
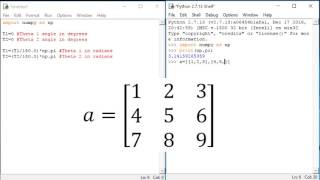
Coordinate Transformation Using Python | Robotics Numerical
Rotation matrix derivation (step-by-step prove)
Reference Frames 3D Plotting Function (w/ GitHub Repository) | Numerical Methods with Python 10
Full Guide
Data is compiled from public records and verified media reports.
Last Updated: June 23, 2026
Conclusion
For 2026, Rotation Matrix And Reference Frames Numerical Methods With Python 4 Pfs2Yi1oLsI remains one of the most talked-about information profiles. Check back for the latest updates.
Disclaimer: Disclaimer: Details details are based on publicly available data, media reports, and general analysis. Actual facts may vary.