Mpu 6050 Data With A Complementary Filter Qmd6CVrlHOM
Safe & Secure Download - Verified by Simple Educational ERP
Mpu 6050 Data With A Complementary Filter Qmd6CVrlHOM Information Guide
Background on Mpu 6050 Data With A Complementary Filter Qmd6CVrlHOM

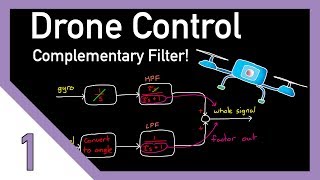
Writeup of this project at: Real-time Accelerometer ... Find all of my other videos here: Get the map of control theory: ... Mocap Suit Building Part 10 In this video, I have explained MPU6050 data visualization using complementary filter. comment to get code Video Description: Discover how to accurately measure 3D orientation angles—Pitch, Roll, and Yaw—using the ... Complementary filter MyRIO & MPU-6050 Inertial Measurement Unit
Full code and manual on GitHub: In this video, you will learn how you can use the ... This is part of my guide on how to use a gyro and a accelerometer with a Arduino. More info can be found here: ... the other videos in this series: Part 1 - What Is Sensor Fusion?: Part 2 - Fusing an Accel, ...
Key Details

Recent Updates











Expert Insights
Data is compiled from public records and verified media reports.
Last Updated: June 20, 2026
Final Thoughts

Disclaimer: Disclaimer: Details details are based on publicly available data, media reports, and general analysis. Actual facts may vary.
